Workplace-Service-Robot
Autonomous Mobile Robot (AMR), a holonomic drive with 4 mecanum-wheels. It autonomously maps an environment, localizes itself, and navigate to pick-up and drop-off objects in a simulated environment.
View the Project on GitHub basavarajnavalgund/Workplace-Service-Robot
Workplace Service Robot
Pre requisites
- install gazebo 7+
- ros kinetic
Install all the other required packages
rosdep install --from-paths . --ignore-src -r -y
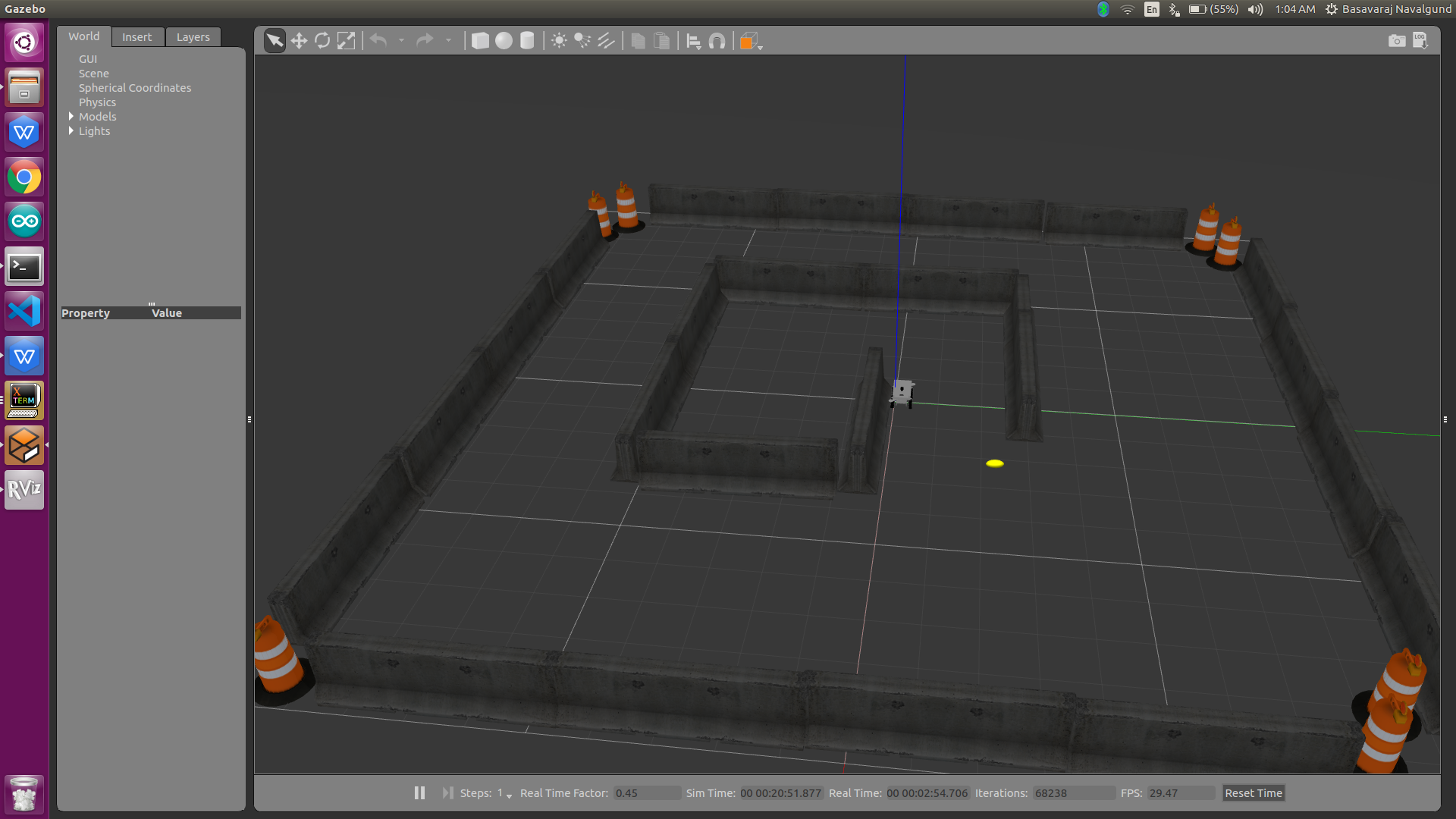
How to run the gazebo sim
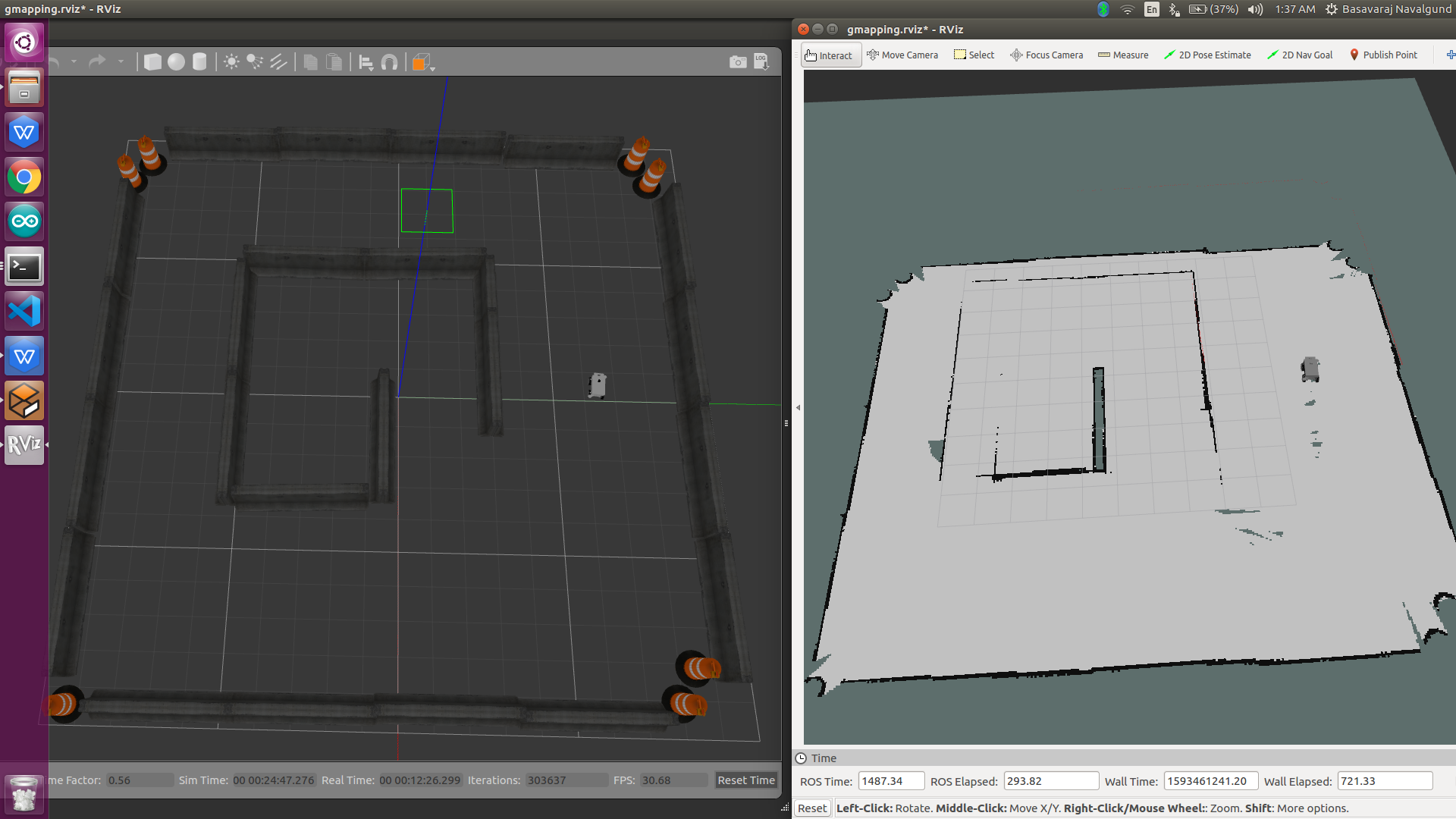
To perform SLAM with gmapping
./test_slam.sh
To perform SLAM with gmapping including obstacle avoidance
./obstacle_avoidance.sh
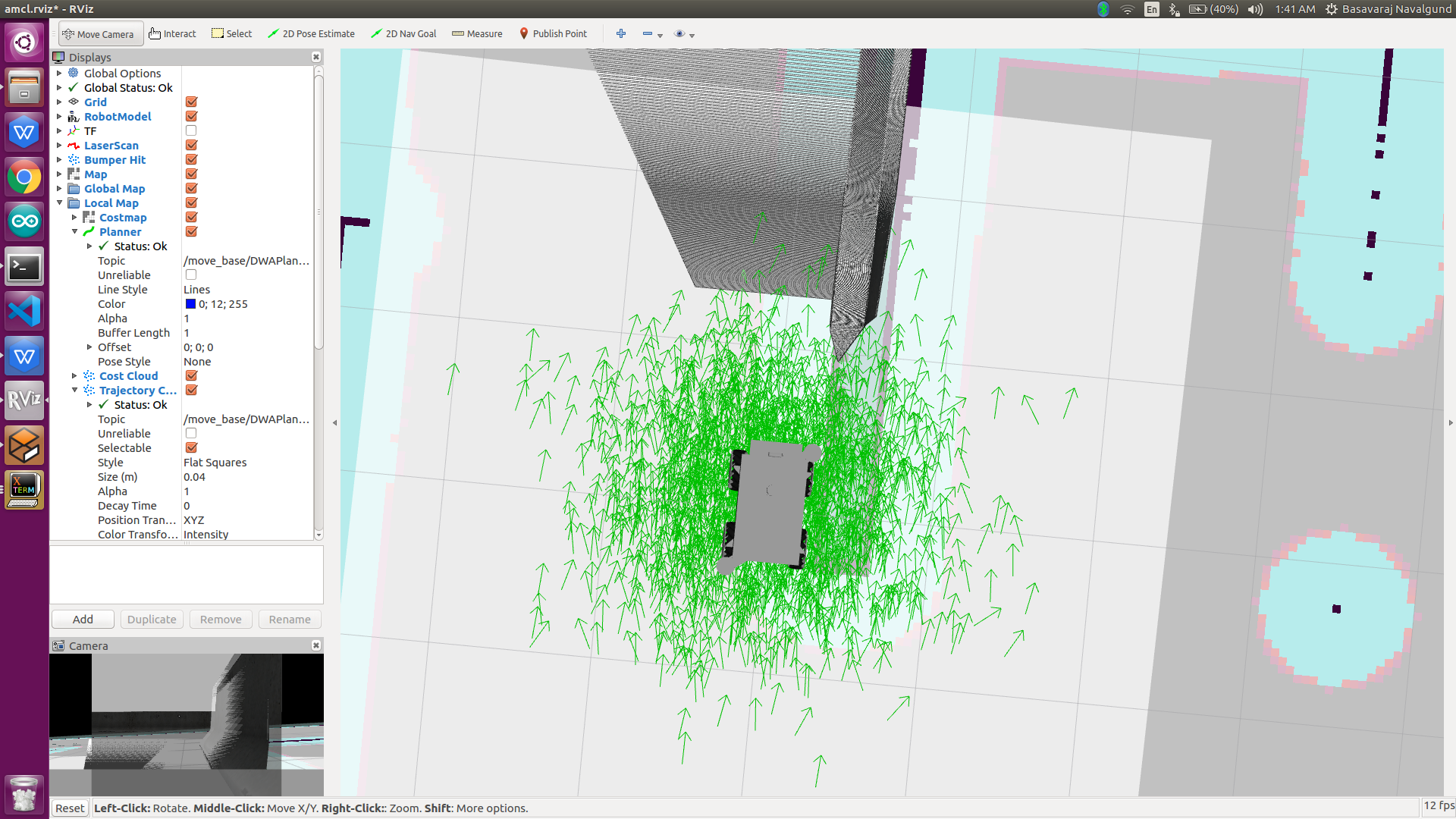
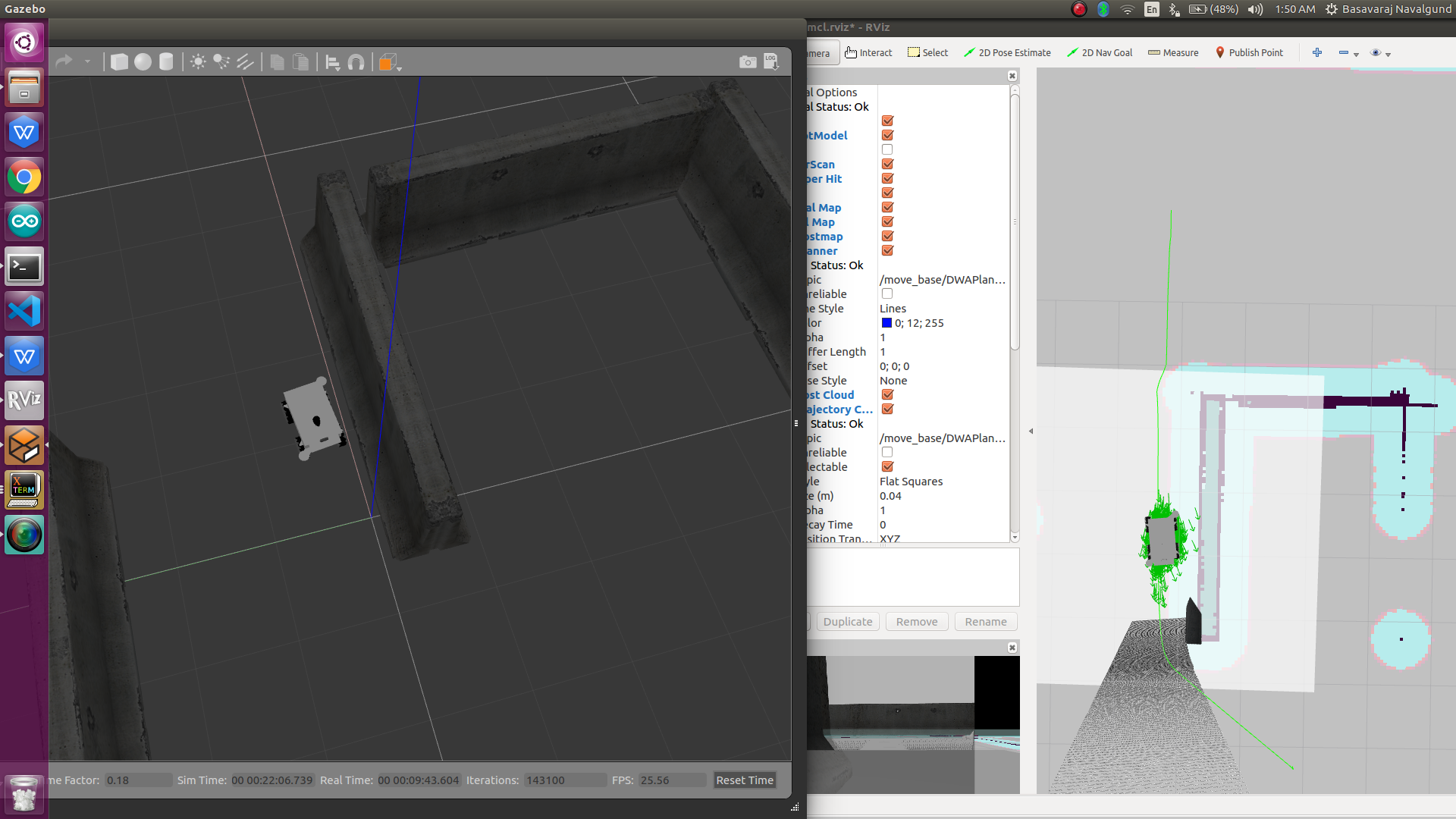
To launch autonomous navigation
./test_navigation.sh
To launch RVIZ
rviz